


“We do not want the technology to decide what kind of city we will have,” says Benjamin de la Peña, deputy director for policy, planning, mobility and right of way at Seattle’s Department of Transportation, pointing to the way planners in the early 1900s reshaped cities to accommodate automobiles. “We need to decide what kind of city we want and have the technology adapt to that kind of city.”
This is one public official’s response to driverless cars – rather than serving the mobility needs of the traveling public, autonomous vehicles should serve the ideological vision of urban planners and public agency officials.
This viewpoint is reflective of policies being developed by larger public agencies, like the Washington State Department of Transportation (WSDOT), as they prepare to deal with the evolution of autonomous cars.
Autonomous vehicles threaten to disrupt government’s decades-long effort to reduce the use of single-occupant, privately-owned vehicles under the guise of sustainability and safety. Some officials argue that with this technology, traffic congestion would “spread like a cancer,” a reference more to the purported horrors of urban sprawl rather than concern for addressing traffic congestion itself.
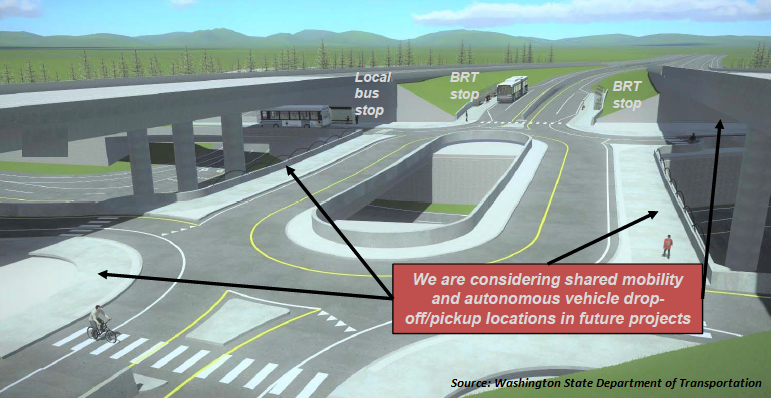
Government is preparing by creating policies that inflate the value of public transit and confine autonomous vehicles to be used for shared mobility. Shared mobility “refers to the shared use [of a] transportation mode” on an “as-needed basis.” To be sure, shared mobility is a great choice to have if it works for your lifestyle and your commute. However, it doesn't work for everyone. If you are an individual commuter and were hoping the new technology would provide you with a more bearable commute, WSDOT wants you to think again.
Policies like this appear to protect a political vision - one in which new technology is confined to uses that primarily benefit public transit and urban-centric growth. The vision is now being called Cooperative Automated Transportation (CAT), and was captured in a slide deck presented at a webinar.
The vision behind CAT is this:
This vision has nothing to do with capitalizing on the use of autonomous vehicles for the benefit of individuals, but rather to encourage “cooperative transportation” – code for supporting transit, walking, and biking, often at the expense of single-occupant vehicle travel.
The state’s transportation officials are focused on eliminating the choice most Washingtonians prefer, and instead promoting a future where politicians and bureaucrats control the cost, distribution, and availability of transportation services.
They have several policy goals, a few of which I will highlight.
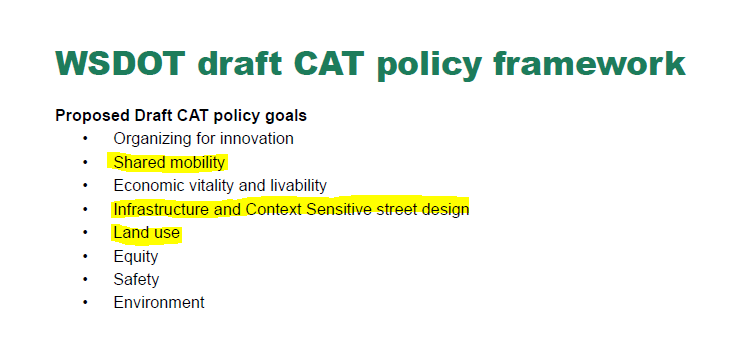
First, the goal of “Shared Mobility.”
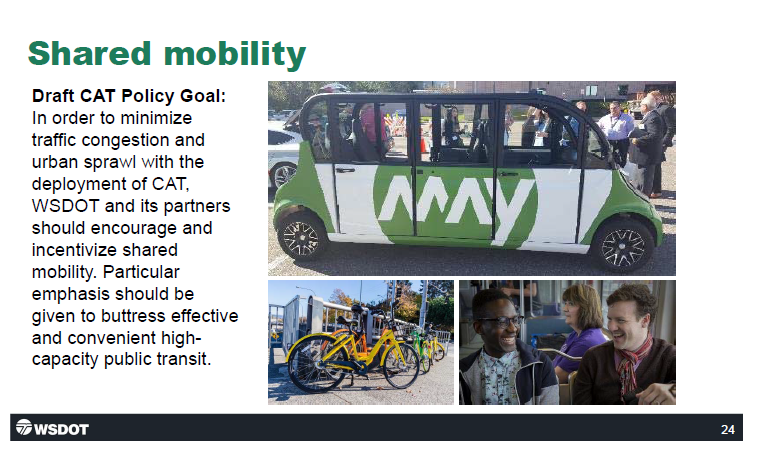
This goal incentivizes shared, rather than individual, mobility to complement public transit, like buses and light rail. Autonomous vehicles that are shared, like carpools, and feed riders into existing public transit modes would be acceptable under this policy goal.
The objective seems not to increase individual freedom and choice, but to discourage urban sprawl and driving by forcing people to accept certain transportation choices.
Further, public agencies dishonestly promote public transit as a travel mode that reduces traffic congestion against overwhelming evidence to the contrary. If the theory of induced demand – which officials often cite as a reason not to expand highways -- is applied, any space that is created by drivers switching from cars to transit would get filled up anyway. Alleviating congestion means adding capacity and strategically addressing interchange and freeway bottlenecks for all users.
Another policy goal is “Infrastructure and Context Sensitive Street Design.”

This policy goal, again, overemphasizes public transit under the guise of “consideration of all modes.” As infrastructure is built to support “autonomy and shared mobility,” it should “safely and efficiently accommodate pedestrians, bicyclists, public transportation and freight.” This represents a hierarchical view of the transportation system, which does not seem to include or accommodate single occupant drivers of existing vehicles (of which millions will operate on the roads for years to come) or for coming autonomous vehicles.
Last but not least, there is the policy goal around “Land Use.”
WSDOT’s land use policy goal, ostensibly promoted as supporting the future of CAT, restates WSDOT’s commitment to centralized planning in an effort to reduce vehicle travel per recommendations in state law, and clearly states that “implementation of CAT should not incentivize urban sprawl.” This sentiment is echoed by Patrick Marshall in Seattle Business Mag. Marshall states, “If AV vehicles are largely used for single occupancy, they could cause worse congestion by persuading more people to live father away from the city.” According to “Driverless Seattle: How Cities Can Plan for Automated Vehicles,” the University of Washington Tech Policy Lab states “Drivers may tolerate longer commutes or choose different travel routes if they are able to perform other tasks in the car (e.g., work, sleep).”
The productivity and flexibility which long-distance commuters could enjoy thanks to autonomous technology makes single-occupancy travel more attractive and even more competitive against public transit. Unfortunately, this is likely perceived as an inconvenient competitive advantage by government officials who want to reduce how much we drive.
The policy goals under CAT are presented as a blueprint for WSDOT to prepare for the connected and automated vehicle revolution, but instead they read as a new means of reducing the usefulness of the private automobile to the individual.